MicroControlador PIC16F84
El cerebro del robot que vamos a construir es un pequeño computador
digital que está dentro de un circuito integrado. A dicho componente
se llama "microcontrolador" y es uno de los avances más espectaculares
de la Microelectrónica moderna.
Este
uC va a ser el cerebro de nuestro Robot, es un uC bastante económico
y versátil, su precio ronda alrededor de los 6€,
nos viene perfecto para nuestros pequeños proyectos.
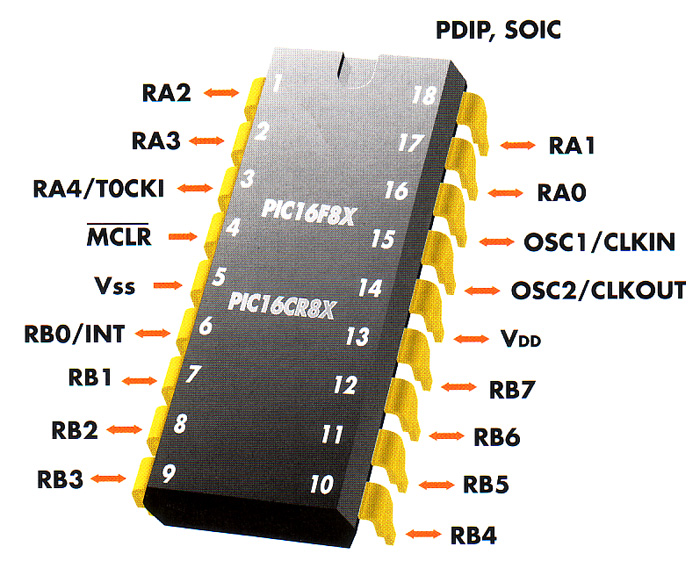
Este es el esquema general de todas sus patitas, como veis hay
Patitas RA0....4 y patitas RB0...RB7, eso es porque este PIC tiene
2 Puertos A y B, el A es de 5bits y el B es de 8Bits, lo podemos
gestionar por puerto al completo y tambien por patitas individuales,
una ventaja a la hora de gestionar el puerto completo es el manejo
de displais, cuando queramos mandar un 0 al display lo haremos
mas facilmente que si lo hacemos bit a bit.
Todos los puertos A y B son puertos de Entrada/Salida, asi que
las podemos usar para lo que queramos (Para sensores que serian
entradas o Actuadores que serian salidas, como por ejemplo un
motor o servo).
Ahora os voy a decir las conexiones mínimas
obligatorias que hay que realizar siempre.
1. Hay que poner un pulsador "reset" en la patita MCLR
porque esta patita se activa con nivel bajo, es decir cuando hay
un 0 lógico todos sus registros se ponen a 0 y si la dejamos
sin conectar nunca se pondrá en marcha. Como veis la patita
tendria siempre la alimentacion de 5V, y si al bicho se le va
la olla (veis que se ha quedado colgao o lo que sea) pulsais el
reset y se reinicia el programa.
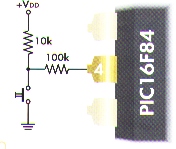 Esquema MTCR
Esquema MTCR
2. También hay que conectar el Oscilador, esto es el reloj
del uC, es decir, como los Mhz de un PC, es el tiempo con el
que se ejecuta cada instrucción o línea de nuestro
programa.
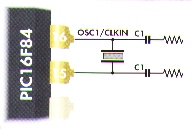 Esquema Oscilador
Esquema Oscilador3.
Por ultimo las alimentaciones de +5vcc en la patita 14
y Negativo o masa en la patita 5. Podeis encontrar
informacion util de como hacer el regulador aqui
y el esquema completo de kikebot1 aqui.
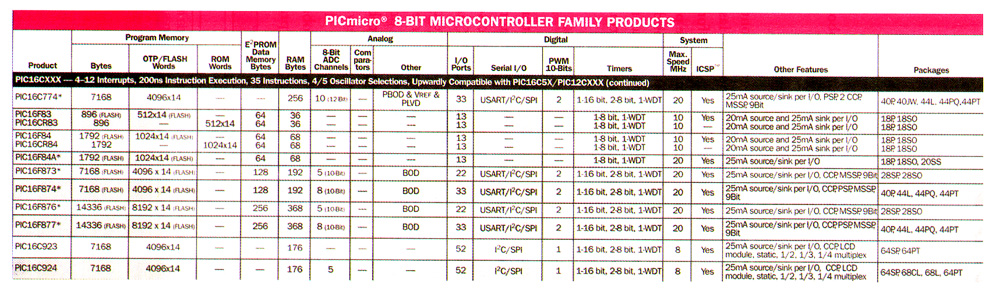
Por
ultimo os dejo aquí una tabla de la familia PIC, por
si se os queda 'pequeño' el 16F84 y necesitáis
mas entradas/salidas.
|