Gobernar Motores C.C.
El motor de corriente continua (C.C.) es el periférico por
excelencia en el mundillo de la Robótica, si se sabe
gobernar correctamente lo podemos utilizar en numerosas aplicaciones.
Un PIC puede gobernar el arranque, parada, sentido de giro y
la velocidad de este. ¿como? veamoslo continuación.
Estas maniobras las podemos hacer de 2 formas: O bien con
el clásico circuito de potencia basado en en el clásico
puente en H formado por transistores y componentes discretos
(un circuito complejo) o bien con un Driver para gobernar motores
de corriente continua del tipo L293B, que puede
gobernar hasta 2 motores de corriente continua (C.C.).
Como he dicho el L293B puede convertir las
señales lógicas de nuestro PIC en señales
de potencia aplicables al motor, este chip se controla directamente
desde el PIC y amplificara las señales para poder activar
el motor.
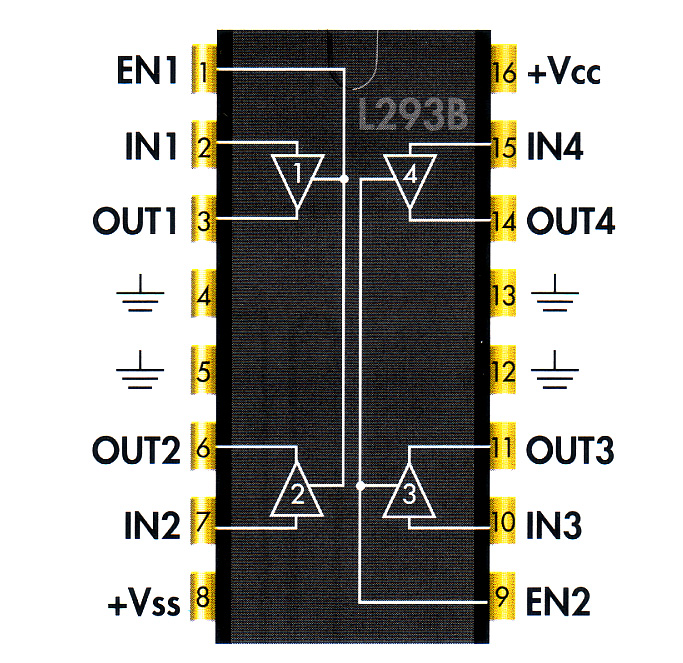 Patillaje y esquema del L293B
Patillaje y esquema del L293B
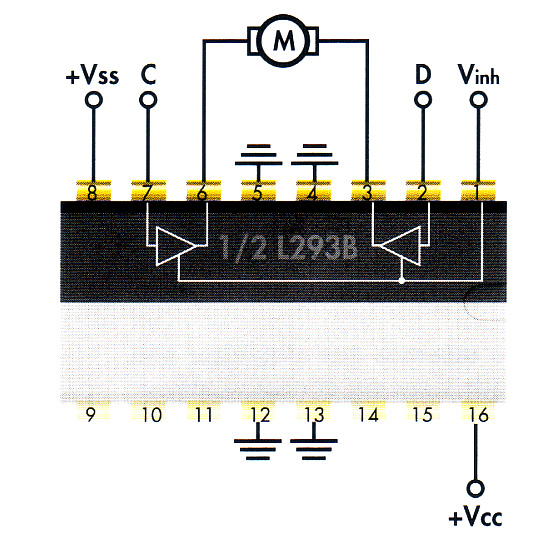
Si conectamos el motor de corriente continua (C.C.) como muestra
la imagen superior, podemos controlar con tan solo 2 señales
del PIC, tanto el encendido como el apagado del motor así
como su sentido de giro. El encendido y apagado lo conseguimos
habilitando o no la señal Enable del driver (Vinh). Para
cambiar el sentido de giro, tan solo tenemos que enviarle la
combinación '1'-'0' o '0'-'1' por las patitas C y D.
La tensión del motor se aplica por la entrada Vss.
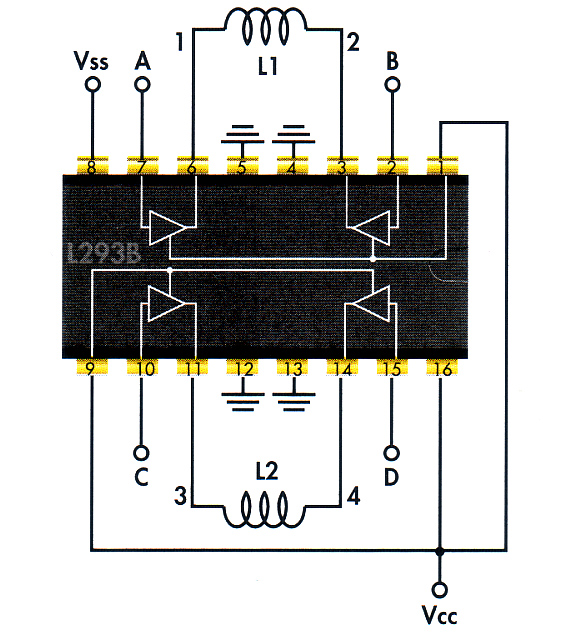
Con este Driver también es posible controlar motores
paso a paso, conectando cada una de las bobinas a los lados
del L293B. Desde el PIC solo deberemos enviar la secuencia apropiada
de códigos binarios para que el motor gire a Izquierda
y Derecha a una determinada velocidad (es cuestión de
que hagais pruebas).