|
Kikebot1 - Esquema Placa Control
Esta
es la Placa de Control, e intentado que quede lo mas claro posible,
de echo he tardado tanto en subirla, porque la he tenido que
pasarla a limpio! uno hace sus apuntes y.... al final.... ¡no
lo entendia ni yo! ;P.
Lo
Tenéis que tener en cuenta es la alimentación,
para este tipo de circuitos es muy importante que este estabilizada,
esto lo conseguiremos a través del estabilizador de tensión
7805CV. Podeis ver los detalles del circuito regulador
aqui.
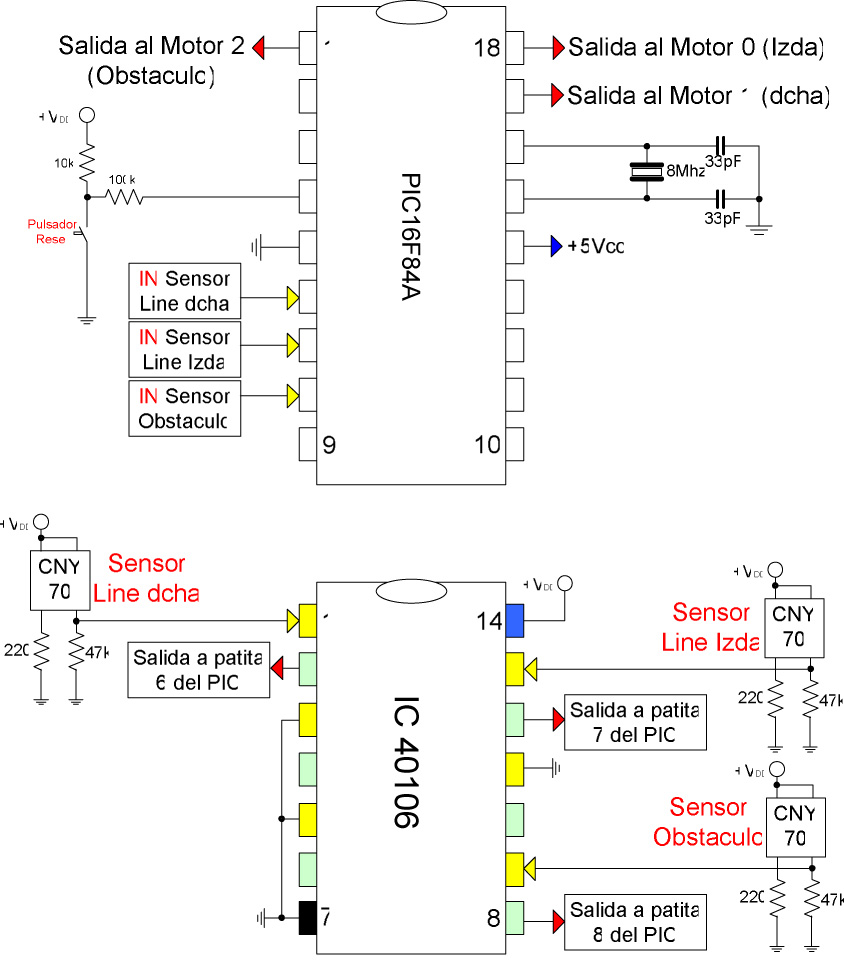
Esta
claro que las patitas 1, 18 y 17 del PIC van directamente a los
motores, esto es posible porque utilizo Servos de Aeromodelismo,
y solo se necesita un tipo de pulso para girar el motor. La patita
4 va al Reset del PIC, esto es por si "se cuelga" el
programa poder reiniciarlo (a mi no me ha pasado nunca, pero es
necesario ponerlo). Las patitas 16 y 15 van al "Reloj",
que como explique antes es como los Mhz de un PC. La patita 14
es la alimentación de 5V. La patita 5 es el negativo (masa).
Las patitas 6, 7 y 8 son las entradas de los sensores de línea
y obstáculo.
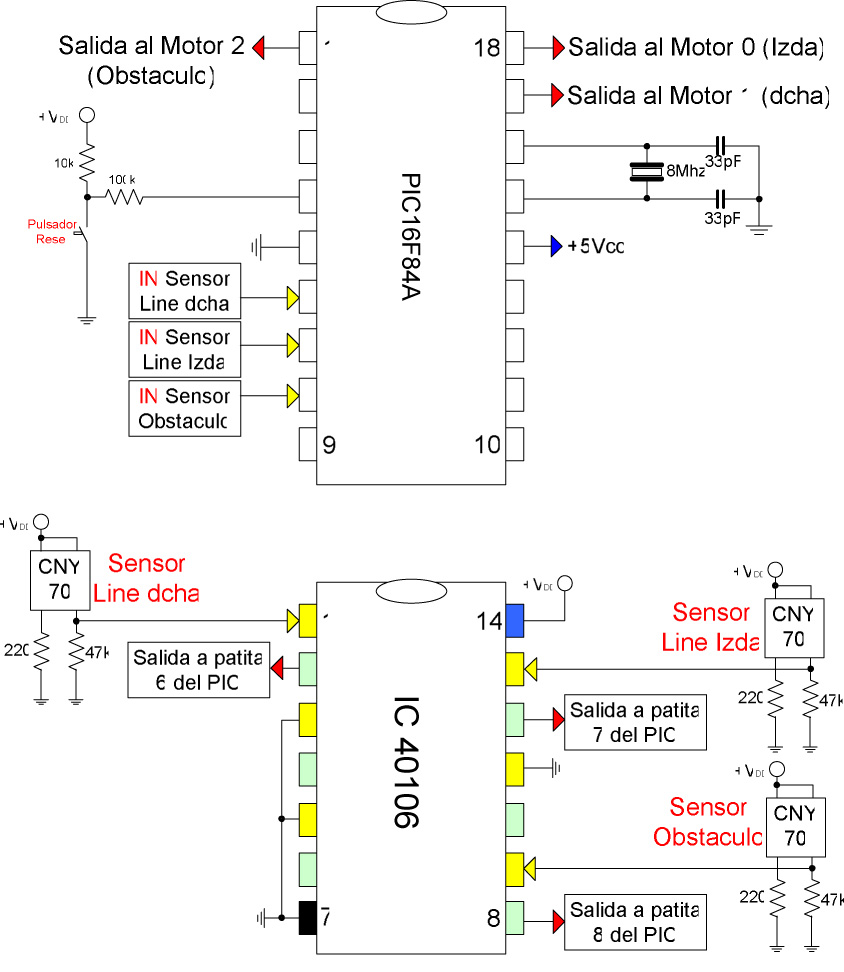
El
otro integrado, (el de abajo) es el IC 40106, este sirve para
adaptar el los niveles de señal al estándar TTL,
esto también lo explico en el capítulo de sensores,
bueno chicos espero que este todo claro ¡venga a construirlo!.
|